Methodology
Firstly, the circuit diagram is drawn using ISIS Proteus software as shown in figure above which include microcontroller PIC18F4431, speed control button, LCD display and optocouplers.



For the coding part, Picbasic Pro compiler is used to generate three-phase PWM signal. This compiler is assisted by MicroCode Studio for the compiling of the coding.
After
the coding is compiled, transfer it into microcontroller in ISIS Proteus
software to generate the PWM signal. The signal is observed using digital
oscilloscope inside the software. The finalized coding is then transferred into
real microcontroller using PicKit2 software.
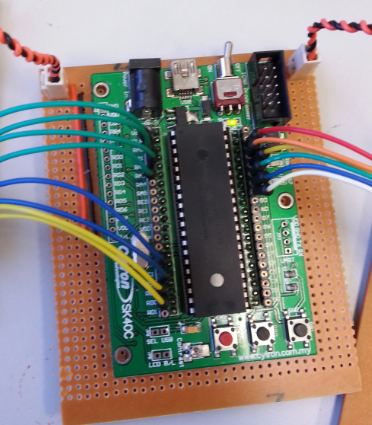
Hardware
The
real project circuit is divided into four part, microcontroller, LCD,
optocouplers and gate driver connected as shown in figures.
Microcontroller
of PIC18F4431 is used to generate three-phase PWM signal. The PIC18F4431 is
mounted on the SK40C and supply with 5V. The upper part jumper is connected to
the optocoupler circuit whereas the lower part jumper connects to the LCD
screen.




IR2130 is used as the gate driver to turn IGBT
on and off and supplied by 15V. The input of driver from pin 2 until pin 7 is
connected to the output of the optocoupler and the output of driver is then
connected to the input of IGBT circuit.
Three
set of IGBT are used as inverter that converts DC voltages into AC voltages.
The input comes from gate driver circuit and the
three-phase output is connected to the motor.

Result
Figure
at below shows the high side PWM output from the gate driver. A maximum voltage of
about 25V and minimum voltage of 14V is recorded. The mean voltage of 11V is
provided for three-phase high PWM signal.

High side PWM output (gate driver)

High and low side PWM ( gate driver)
The output of PWM signal which the upper signal
(yellow) is the high signal and lower signal (blue) is the low signal. The
deadtime is created when the signal pass through the gate driver circuit. the deadtime is 22 -60 ns.

Single phase IGBT output voltage signal
When the three-phase output
of the IGBT is connected to the motor input, it successfully turns on the motor
and the speed can be adjusted by pressing the increase or decrease button at
microcontroller input part. Some voltages and current are measured during the
motor is running.


PWM
|
Without PWM
| |
Current
|
0.048
|
0.255
|
The table shows that by using PWM technique, the current used can be efficiently reduced which directly means less power is consumed. Whereas the system without PWM, more current is required to run the motor which means it is less efficient since more power is used. Hence, PWM technique is preferred compare to system without PWM.






